Прежде чем перейти к описанию приемника, рассмотрим распределение частот для аппаратуры радиоуправления. И начнем здесь с законов и норм. Для всей радиоаппаратуры распределение частотного ресурса в мире ведет международный комитет по радиочастотам. Он имеет несколько подкомитетов по зонам земного шара. Поэтому в разных зонах Земли под радиоуправление выделены разные диапазоны частот. Более того, подкомитеты лишь рекомендуют государствам в их зоне распределение частот, а национальные комитеты в рамках рекомендаций вводят свои ограничения. Дабы не раздувать описание сверх меры, рассмотрим распределение частот в американском регионе, Европе и в нашей стране.
В целом для радиоуправления используется первая половина УКВ диапазона радиоволн. В американском регионе это диапазоны 50, 72 и 75 МГц. Причем 72 МГц — исключительно для летающих моделей. В Европе разрешены диапазоны 26, 27, 35, 40 и 41 МГц. Первый и последний во Франции, остальные по всему ЕС. В родном отечестве разрешенными являются диапазон 27 МГц и с 2001 года небольшой участок диапазона 40 МГц. Такой узкий расклад радиочастот мог бы сдерживать развитие радиомоделизма. Но, как верно подмечено русскими мыслителями еще в 18 веке «строгость законов на Руси компенсируется лояльностью к их неисполнению». Реально в России и на территории бывшего СССР широко используются диапазоны 35 и 40 МГц по европейской раскладке. Некоторые пытаются использовать американские частоты, и иногда успешно. Однако чаще всего эти попытки срываются помехами УКВ-радиовещания, которое с советских времен использует как раз этот диапазон. В диапазоне 27-28 МГц радиоуправление разрешено, но использовать его можно только для наземных моделей. Дело в том, что этот диапазон отдан также под гражданскую связь. Там работает огромное количество станций типа «Воки-токи». Вблизи промышленных центров помеховая обстановка в этом диапазоне очень плохая.
Диапазоны 35 и 40 МГц наиболее приемлемы в России, причем последний разрешен законодательством, правда, не весь. Из 600 килогерц этого диапазона у нас легализовано только 40, с 40,660 по 40,700 МГц (см. Решение ГКРЧ России от 25.03.2001, Протокол N7/5). То есть, из 42 каналов у нас официально разрешены только 4. Но и в них могут быть помехи от других радиосредств. В частности, в СССР было выпущено около 10000 радиостанций «Лен» для использования в строительном и агропромышленном комплексе. Они работают в диапазоне 30 — 57 МГц. Большая их часть до сих пор активно эксплуатируется. Поэтому и здесь от помех никто не застрахован.
Заметим, что законодательство многих стран разрешает к использованию для радиоуправления и вторую половину УКВ-диапазона, однако серийно такая аппаратура не выпускается. Это связано со сложностью в недавнем прошлом технической реализации частотообразования в диапазоне выше 100 МГц. В настоящее время элементная база позволяет легко и дешево формировать несущую до 1000 МГц, однако инерционность рынка пока тормозит массовое производство аппаратуры в верхней части УКВ-диапазона.
Для обеспечения надежной бесподстроечной связи частота несущей передатчика и частота приема приемника должны быть достаточно стабильны и переключаемыми, чтобы обеспечить совместную беспомеховую работу нескольких комплектов аппаратуры в одном месте. Эти задачи решаются использованием в качестве частотозадающего элемента кварцевого резонатора. Чтобы иметь возможность переключения частот кварцы делаются сменными, т.е. в корпусах передатчика и приемника предусматривается ниша с разъемом, и кварц нужной частоты легко меняется прямо в поле. С целью обеспечения совместимости частотные диапазоны разбиты на отдельные частотные каналы, которые еще и пронумерованы. Интервал между каналами определен в 10 кГц. К примеру, частота 35,010 МГц соответствует 61 каналу, 35,020 — 62 каналу, а 35,100 — 70 каналу.
Совместная работа двух комплектов радиоаппаратуры на одном поле на одном частотном канале в принципе невозможна. Оба канала будут непрерывно «глючить» вне зависимости от того, в каких режимах они работают АМ, FM или PCM. Совместимость достигается только при переключении комплектов аппаратуры на разные частоты. Как это достигается практически? Каждый приехавший на летное поле, автотрассу или водоем обязан осмотреться, нет ли здесь других моделистов. Если они есть, надо обойти каждого и поинтересоваться, в каком диапазоне и на каком канале работает его аппаратура. Если находится хоть один моделист, у которого канал совпадает с вашим, а сменных кварцев у Вас нет, договаривайтесь с ним, чтобы включать аппаратуру только по очереди, и вообще, держитесь к нему поближе. На соревнованиях частотная совместимость аппаратуры разных участников это забота организаторов и судей. За рубежом для опознавания каналов принято на антенну передатчика прикреплять специальные вымпелы, цвет которых определяет диапазон, а цифры на нем — номер (и частоту) канала. Однако, у нас лучше придерживаться описанного выше порядка. Более того, поскольку на соседних каналах передатчики могут мешать друг другу вследствие иногда встречающегося синхронного ухода частоты передатчика и приемника, осторожные моделисты стараются не работать на одном поле на соседних частотных каналах. То есть, каналы выбирают так, чтобы между ними был хотя бы один свободный.
Для наглядности приведем таблицы номеров каналов для Европейской раскладки:
|
|
Жирным шрифтом выделены каналы, разрешенные законом к применению в России. В диапазоне 27 МГц приведены только предпочтительные каналы. В Европе межканальный интервал составляет 10 кГц.
А вот таблица раскладки для Америки:
|
|
В Америке нумерация своя, а межканальный интервал уже 20 кГц.
Чтобы разобраться до конца с кварцевыми резонаторами, мы забежим несколько вперед и скажем пару слов о приемниках. Все приемники в серийно выпускаемой аппаратуре построены по схеме супергетеродина с одним либо с двумя преобразованиями. Что это такое мы объяснять не будем, кто знаком с радиотехникой, тот поймет. Так вот, частотообразование в передатчике и приемнике разных производителей происходит по-разному. В передатчике кварцевый резонатор может возбуждаться на основной гармонике, после чего его частота удваивается, либо утраивается, а может и сразу на 3-й или 5-й гармонике. В гетеродине приемника частота возбуждения может быть как выше частоты канала, так и ниже на величину промежуточной частоты. В приемниках двойного преобразования две промежуточные частоты (как правило, 10,7 МГц и 455 кГц), поэтому число возможных комбинаций еще выше. Т.е. частоты кварцевых резонаторов передатчика и приемника никогда не совпадают, как с частотой сигнала, которая будет излучаться передатчиком, так и между собой. Поэтому производители аппаратуры договорились указывать на кварцевом резонаторе не его реальную частоту, как это принято в остальной радиотехнике, а его предназначение ТХ — передатчик, RX — приемник, и частоту (или номер) канала. Если кварцы приемника и передатчика поменять местами, аппаратура работать не будет. Правда, есть одно исключение: некоторые аппараты с АМ могут работать и с перепутанными кварцами, при условии, что оба кварца на одной гармонике, однако частота в эфире будет на 455 кГц больше или меньше, чем обозначенная на кварце. Хотя, дальность при этом упадет.
Выше было отмечено, что в режиме РРМ могут совместно работать передатчик и приемник разных производителей. Как быть с кварцевыми резонаторами? Чьи куда ставить? Можно рекомендовать ставить в каждый прибор родной кварцевый резонатор. Довольно часто это помогает. Но не всегда. К сожалению, допуски на точность изготовления кварцевых резонаторов разных производителей существенно различаются. Поэтому возможность совместной работы конкретных компонентов разных производителей и с разными кварцами можно установить только опытным путем.
И еще. В принципе, на аппаратуре одного производителя можно в некоторых случаях ставить кварцевые резонаторы другого производителя, но мы этого делать не рекомендуем. Кварцевый резонатор характеризуется не только частотой, но и рядом других параметров, таких как добротность, динамическое сопротивление и т.п. Производители проектируют аппаратуру под конкретный тип кварца. Применение другого в целом может снизить надежность работы радиоуправления.
Краткие итоги:
- Приемнику и передатчику требуются кварцы именно того диапазона, на который они рассчитаны. Кварцы на другой диапазон работать не будут.
- Кварцы лучше брать того же производителя, что и аппаратура, иначе работоспособность не гарантирована.
- При покупке кварца для приемника нужно уточнить, он с одним преобразованием или нет. Кварцы для приемников двойного преобразования не будут работать в приемниках с одинарным преобразованием, и наоборот.
- Разновидности приемников
- Устройство приемника
- Борьба с бортовыми помехами
- Самодельная аппаратура?
- Заключение
- Разновидности пультов ДУ
- На какие характеристики нужно обратить внимание при выборе
- Революционеры в мире радиоуправления — лучшие пульты для вашей машины
- Как настраивать машину
- Что изменять?
- Угол развала колес (Camber)
- Схождение колес
- Жесткость подвески
- Угол наклона амортизаторов
- Угол наклона шкворня
- Угол наклона оси качания нижнего рычага
- Положение поперечного центра крена
- Клиренс
- Последовательность внесения изменений
- Угол развала (Camber)
- Прирост развала (Camber Intake)
- Угол кастера (Caster Angle)
- Схождение (Toe-In) и расхождение (Toe-Out)
- Угол Акермана
- Угол бокового увода (Slip angle)
- Перенос веса (Weight Transfer)
- Центр крена (Roll center)
- Недостаточная поворачиваемость (Understeer)
- Избыточная поворачиваемость (Oversteer)
- Другие важные факторы, которые следует учесть
- Жесткость пружин (Spring rate)
- Ход подвески (Suspension Travel)
- Демпфирование (Damping)
- Анти-дайв и анти-скват (Anti-dive and Anti-squat)
- Круг сил (Circle of forces)
- Критическая скорость
- Поиск золотой середины (или сбалансированная автомодель)
Разновидности приемников
Как мы уже указывали, на управляемой модели устанавливается приемник.
|
|

|
|
|


Приемники аппаратуры радиоуправления рассчитаны на работу только с одним видом модуляции и одним видом кодирования. Таким образом, есть приемники АМ, FM и РСМ. Причем РСМ у разных фирм разная. Если на передатчике можно просто переключить метод кодирования с РСМ на РРМ, то приемник надо заменять на другой.
Приемник выполнен по схеме супергетеродина с двумя, либо с одним преобразованием. Приемники с двумя преобразованиями имеют в принципе лучшую избирательность, т.е. лучше отсеивают помехи с частотами за пределами рабочего канала. Как правило, они дороже, однако их применение оправдано для дорогих, особенно летающих моделей. Как уже отмечалось, кварцевые резонаторы на один и тот же канал у приемников с двумя и одним преобразованием разные и не взаимозаменяемые.
Если расположить приемники по возрастанию степени помехоустойчивости (и, к сожалению, цены), то ряд будет выглядеть так:
- одно преобразование и АМ
- одно преобразование и FM
- два преобразования и FM
- одно преобразование и РСМ
- два преобразования и РСМ
Выбирая из этого ряда приемник для Вашей модели, нужно учитывать ее предназначение и стоимость. Неплохо с точки зрения помехозащищенности на тренировочную модель поставить РСМ-приемник. Но, вогнав модель в бетон при обучении, Вы облегчите свой кошелек на гораздо большую сумму, чем с FM-приемником одного преобразования. Аналогично, поставив на вертолет АМ-приемник, либо упрощенный FM-приемник, Вы потом об этом серъезно пожалеете. Особенно, если летать вблизи крупных городов с развитой промышленностью.
Приемник может работать только в одном диапазоне частот. Переделка приемника с одного диапазона на другой теоретически возможна, но экономически вряд ли оправдана, поскольку велика трудоемкость этой работы. Провести ее могут только высококвалифицированные инженеры в условиях радиолаборатории. Некоторые диапазоны частот для приемников разбиты на поддиапазоны. Это обусловлено большой шириной диапазона (1000 кГц) при сравнительно низкой первой ПЧ (455 кГц). В этом случае основной и зеркальный каналы попадают в полосу пропускания преселектора приемника. Обеспечить при этом избирательность по зеркальному каналу в приемнике с одним преобразованием вообще невозможно. Поэтому, в европейской раскладке диапазон 35 МГц разбит на два участка: с 35,010 по 35,200 — это поддиапазон «А» (каналы с 61 по 80); с 35,820 по 35,910 — поддиапазон «В» (каналы с 182 по 191). В американской раскладке в диапазоне 72 МГц также выделены два поддиапазона: с 72,010 по 72,490 поддиапазон «Low» (каналы с 11 по 35); с 72,510 по 72,990 — «High» (каналы с 36 по 60). Для разных поддиапазонов выпускаются разные приемники. В диапазоне 35 МГц они невзаимозаменяемые. В диапазоне 72 МГц они частично взаимозаменяемы на частотных каналах вблизи границы поддиапазонов.
Следующий признак разновидности приемников — число каналов управления. Приемники выпускаются с числом каналов от двух до двенадцати. При этом схемотехнически, т.е. по их «потрохам», приемники на 3 и 6 каналов могут вообще не различаться. Это означает, что в трехканальном приемнике могут иметься декодированные сигналы четвертого, пятого и шестого каналов, но к ним не сделаны разъемы на плате для подключения дополнительных сервомашинок.
Для полного использования разъемов на приемниках часто не делают отдельного разъема питания. В случае, когда не ко всем каналам подключены сервомашинки, кабель питания от бортового выключателя подключается к любому свободному выходу. Если же все выходы задействованы, то одна из сервомашинок подключается к приемнику через разветвитель (так называемый Y-кабель), к которому подключается питание. При питании приемника от силового аккумулятора через регулятор хода с функцией ВЕС, специального питающего кабеля вообще не нужно — питание поступает по сигнальному кабелю регулятора хода. Большинство приемников рассчитано на питание номинальным напряжением 4,8 вольт, что соответствует батарее из четырех никель-кадмиевых аккумуляторов. Некоторые приемники допускают использование бортового питания из 5 аккумуляторов, что улучшает скоростные и силовые параметры некоторых сервомашинок. Здесь надо быть внимательным к инструкции по эксплуатации. Приемники, не рассчитанные на повышенное напряжение питания, в этом случае могут сгореть. То же самое касается рулевых машинок, у которых может резко упасть ресурс.
Приемники для наземных моделей выпускают часто с укороченной проволочной антенной, которую легче разместить на модели. Удлинять ее не следует, поскольку это не увеличит, а уменьшит дальность надежной работы аппаратуры радиоуправления.
Для моделей судов и автомобилей выпускаются приемники во влагозащитном корпусе:

Для спортсменов выпускаются приемники с синтезатором. Здесь нет сменного кварца, а рабочий канал задается многопозиционными переключателями на корпусе приемника:
|
|
|


С появлением класса сверхлегких летающих моделей, — комнатных, начат выпуск специальных очень маленьких и легких приемников:

|
|
|


Эти приемники часто не имеют жесткого полистиролового корпуса и оформлены в термоусаживаемой ПВХ-трубке. В них могут встраиваться интегрированный регулятор хода, что в целом снижает вес бортовой аппаратуры. При жесткой борьбе за граммы, допускается использовать миниатюрные приемники без корпуса вообще. В связи с активным применением в сверхлегких летающих моделях литий-полимерных аккумуляторов (у них удельная емкость в разы больше, чем у никелевых), появились специализированные приемники с широким диапазоном питающего напряжения и встроенным регулятором хода:

Подытожим сказанное выше.
- Приемник работает только в одном диапазоне (поддиапазоне) частот
- Приемник работает только с одним видом модуляции и кодирования
- Приемник надо выбирать соответственно предназначению и стоимости модели. Нелогично на модель вертолета ставить АМ-приемник, а на простейшую тренировочную модель — РСМ-приемник с двойным преобразованием.
Устройство приемника
Как правило, приемник размещен в компактном корпусе и выполнен на одной печатной плате. К ней прикреплена проволочная антенна. В корпусе имеется ниша с разъемом под кварцевый резонатор и контактные группы разъемов, для подключения исполнительных устройств, таких как сервомашинки и регуляторы хода.
На печатной плате смонтирован собственно приемник радиосигнала и декодер.
|
|
|
|



Сменный кварцевый резонатор задает частоту первого (единственного) гетеродина. Значения промежуточных частот стандартное для всех производителей: первая ПЧ — 10,7 МГц, вторая (единственная) 455 кГц.
Выход каждого канала декодера приемника выведен на трехконтактный разъем, где кроме сигнального имеются контакты земли и питания. По структуре сигнал представляет собой однократный импульс с периодом в 20 мс и длительностью, равной величине канального импульса РРМ сигнала, сформированного в передатчике. РСМ-декодер на выходе имеет такой же сигнал, как и РРМ. Кроме того, PCM-декодер содержит в себе так называемый модуль Fail-Safe, который позволяет при пропадании радиосигнала привести рулевые машинки в заранее заданное положение. Подробнее об этом написано в статье «PPM или PCM? «.
Некоторые модели приемников имеют специальный разъем для обеспечения функции DSC (Direct servo control) — прямое управление сервомашинками. Для этого специальным кабелем соединяется тренерский разъем передатчика и разъем DSC приемника. После чего при выключенном ВЧ-модуле (даже при отсутствии кварцев и неисправной ВЧ части приемника) передатчик напрямую управляет сервомашинками на модели. Функция бывает полезной для наземной отладки модели, чтобы напрасно не засорять эфир, а также для поиска возможных неисправностей. Заодно DSC кабель используется для измерения напряжения питания бортового аккумулятора — во многих дорогих моделях передатчиков это предусмотрено.
К сожалению, приемники ломаются гораздо чаще, чем это хотелось бы. Главными причинами являются удары при крушениях моделей и сильные вибрации от мотоустановок. Чаще всего это происходит, когда моделист при размещении приемника внутри модели пренебрегает рекомендациями по амортизации приемника. Здесь трудно перестараться, и чем больше поролона и губчатой резины задействуется, тем лучше. Самым чувствительным к ударам и вибрациям элементом является сменный кварцевый резонатор. Если после удара у вас заглючит приемник, — попробуйте сменить кварц, — в половине случаев это помогает.
Борьба с бортовыми помехами
Несколько слов о помехах на борту модели и как с ними бороться. Помимо помех с эфира, на самой модели могут быть источники собственных помех. Они расположены близко к приемнику и, как правило, имеют широкополосное излучение, т.е. действуют сразу на всех частотах диапазона, а потому последствия их могут быть плачевными. Типичным источником помех является коллекторный тяговый электродвигатель. С его помехами научились бороться путем питания его через специальные помехозащитные цепи, состоящие из шунтирующего на корпус каждую щетку конденсатора и последовательно включенного дросселя. Для мощных электродвигателей используют раздельное питание самого двигателя и приемника от отдельного, не ходового аккумулятора. В регуляторе хода предусматривается оптоэлектронная развязка цепей управления от силовых цепей. Как ни странно, но бесколлекторные электродвигатели создают не меньший уровень помех, чем коллекторные. Поэтому для мощных моторов лучше использовать регуляторы хода с опторазвязкой и для питания приемника отдельный аккумулятор.
На моделях с бензиновыми двигателями и искровым зажиганием последнее является источником мощных помех в широком диапазоне частот. Для борьбы с помехами используют экранирование высоковольтного кабеля, наконечника свечи и всего модуля зажигания. Системы зажигания с магнето создают помехи несколько меньшего уровня, чем электронные. В последних питание осуществляется обязательно от отдельного аккумулятора, не от бортового. Кроме того, используют пространственное разнесение бортовой аппаратуры от системы зажигания и мотора на минимум четверть метра.
Третьим по значимости источником помех являются сервомашинки. Заметными их помехи становятся на больших моделях, где установлено много мощных сервоприводов, а кабели, соединяющие приемник с сервами становятся длинными. В данном случае помогает надевание на кабель вблизи приемника небольших ферритовых колец так, чтобы кабель сделал на кольце 3-4 витка. Это можно сделать самому, либо купить готовые фирменные удлиняющие сервокабели с ферритовыми колечками. Более радикальное решение — это использование для питания приемника и сервомашинок разных аккумуляторов. В этом случае все выходы приемника подключаются к сервокабелям через специальное устройство с опторазвязкой. Такое устройство можно сделать самому, либо купить готовое фирменное.
В завершение упомянем о том, что пока не очень распространено в России — о моделях гигантах. К ним можно отнести летающие модели весом более восьми — десяти килограмм. Отказ радиоканала с последующим крушением модели в этом случае чреват не только материальными потерями, которые в абсолютной величине немалые, но и создает угрозу для жизни и здоровья окружающих. Поэтому законодательства многих стран обязывают моделистов использовать на таких моделях полное дублирование бортовой аппаратуры: т.е. два приемника, два бортовых аккумулятора, два комплекта сервомашинок, которые управляют двумя комплектами рулей. В этом случае любой одиночный отказ не приводит к крушению, а только несколько снижает эффективность рулей.
Самодельная аппаратура?
В заключение несколько слов к желающим самостоятельно изготовить аппаратуру радиоуправления. На взгляд авторов, занимающихся радиолюбительством много лет, в большинстве случаев это не оправдано. Желание сэкономить на покупке готовой серийной аппаратуры обманчиво. Да и результат вряд ли обрадует своим качеством. Если не хватает средств даже на простой комплект аппаратуры, — берите бывший в употреблении. Современные передатчики устаревают морально раньше, чем изнашиваются физически. Если вы уверены в своих возможностях, возьмите по бросовой цене неисправный передатчик или приемник — его ремонт даст все равно лучший результат, чем самоделка.
Помните, что «неправильный» приемник — это максимум одна загубленная своя модель, а вот «неправильный» передатчик своими внеполосными радиоизлучениями может побить кучу чужих моделей, которые могут оказаться более дорогими, чем своя.
На тот случай, если тяга к изготовлению схем непреодолима, покопайтесь сначала в интернете. Очень велика вероятность, что вы сможете найти готовые схемы, — это сэкономит вам время и позволит избежать многих ошибок.
Для тех, кто в душе больше радиолюбитель, чем моделист, есть широкое поле для творчества, особенно там, куда еще не дошел серийный производитель. Вот несколько тем, за которые стоит браться самому:
- Если есть фирменный корпус от дешевой аппаратуры, можно попробовать изготовить туда компьютерную начинку. Хорошую примером тут будет MicroStar 2000 — любительская разработка, имеющая полную документацию.
- В связи с бурным развитием комнатных радиомоделей, представляет определенный интерес изготовление модуля передатчика и приемника, использующих инфракрасные лучи. Такой приемник можно сделать меньше (легче), чем лучшие миниатюрные радиоприемники, намного дешевле, и встроить в него ключ управления электромотором. Дальности инфракрасного канала в спортзале вполне хватит.
- В любительских условиях можно довольно успешно делать несложную электронику: регуляторы хода, бортовые микшеры, тахометры, зарядные устройства. Это намного проще, чем сделать начинку для передатчика, и обычно более оправдано.
Заключение
Прочитав статьи по передатчикам и приемникам аппаратуры радиоуправления, вы смогли решить, какая аппаратура вам нужна. Но часть вопросов, как всегда, осталась. Один из них — как покупать аппаратуру: россыпью, или комплектом, в который входит передатчик, приемник, аккумуляторы к ним, сервомашинки и зарядное устройство. Если это первый аппарат в вашей моделистской практике, — лучше брать комплектом. Этим вы автоматически решаете проблемы совместимости и комплектования. Потом, когда ваш модельный парк увеличится, можно будет докупать отдельно приемники и сервомашинки, уже сообразуясь с иными требованиями новых моделей.
При использовании повышенного напряжения бортового питания с аккумулятором на пяти банках, выбирайте приемник, который может справиться с таким напряжением. Обращайте также внимание на совместимость покупаемого отдельно приемника с вашим передатчиком. Приемники выпускает гораздо большее число фирм, чем передатчики.
Два слова о детали, которой часто пренебрегают начинающие моделисты, — о выключателе бортового питания. Специализированные выключатели изготовлены в вибростойком исполнении. Замена их на непроверенные тумблеры или переключатели от радиоаппаратуры может стать причиной отказа в полете со всеми вытекающими последствиями. Будте внимательны и к главному и к мелочам. В радиомоделизме нет второстепенных деталей. Иначе может быть по Жванецкому: «одно неверное движение — и вы отец».
Накануне ответственных соревнований, перед окончанием сборки KIT комплекта автомобиля, после аварий, в момент покупки авто с частичной сборки и еще в ряде других предсказуемых или спонтанных случаев может возникнуть острая необходимость купить пульт к машинке на радиоуправлении. Как не промахнуться с выбором, и каким особенностям следует уделить отдельное внимание? Именно об этом мы вам расскажем ниже!
Разновидности пультов ДУ
Аппаратура управления состоит из передатчика, с помощью которого моделист посылает команды управления и приемника, установленного на автомодели, который ловит сигнал, расшифровывает его и передает для дальнейшего выполнения исполнительными устройствами: сервомашинками, регуляторами. Именно так машинка едет, поворачивает, останавливается, стоит вам нажать на соответствующую кнопку или выполнить необходимую комбинацию действий на пульте.
Автомоделисты в основном пользуются передатчиками пистолетного типа, когда пульт удерживается в руке по типу пистолета. Под указательным пальцем размещается курок газа. При нажатии назад (к себе), машина едет, если надавить в перед — тормозит и останавливается. Если не прикладывать усилие, то курок будет возвращаться в нейтральное (среднее) положение. Сбоку на пульте расположено небольшое колесо — это не декоративный элемент, а самый главный инструмент управления! С его помощью выполняются все повороты. Вращение колесика по часовой стрелке поворачивает колеса вправо, против — направляет модель влево.
Есть еще передатчики джойстикового типа. Они держатся двумя руками, а управления производится правым и левым стиками. Но такой тип аппаратуры редкость для высококачественных авто. Их можно встретить на большинстве воздушной техники, и в редких случаях — на игрушечных радиоуправляемых машинках.
Поэтому с одним важным моментом, как подобрать пульт к радиоуправляемой машине мы уже разобрались — нам нужно ДУ пистолетного типа. Идем дальше.
На какие характеристики нужно обратить внимание при выборе
Несмотря на то, что в любом модельном магазине вы сможете выбрать как простую, бюджетную аппаратуру, так и очень многофункциональную, дорогостоящую, профессиональную, общими параметрами, на которые стоит обратить внимание, будут:
- Частота
- Каналы аппаратуры
- Дальность действия
Связь между пультом для машины на радиоуправлении и приемником обеспечивается с помощью радиоволн, и главный показатель в данном случае — несущая частота. В последнее время моделисты активно переходят на передатчики с частотой 2.4 ГГц, так как она практически не уязвима перед помехами. Это позволяет в одном месте собирать большое количество радиоуправляемых авто и запускать их одновременно, в то время, как аппаратура с частотой 27 МГц или 40 МГц негативно реагирует на присутствие посторонних устройств. Радиосигналы могут перехлестываться и перебивать друг друга, из-за чего контроль над моделью пропадает.
Если вы решили купить пульт управления на радиоуправляемую машинку, вы наверняка обратите внимание на указание в описании количества каналов (2-канальный, 3CH и т.д.) Речь идет о каналах управления, каждый из которых отвечает за одно из действий модели. Как правило, чтобы автомобиль ездил, достаточно двух каналов — работа двигателя (газ/тормоз) и направление движения (повороты). Можно встретить простые машинки-игрушки, у которых третий канал отвечает за дистанционное включение фар.
 В навороченных профессиональных моделях третий канал для управления смесеобразованием в ДВС или для блокировки дифференциала.
В навороченных профессиональных моделях третий канал для управления смесеобразованием в ДВС или для блокировки дифференциала.
Этот вопрос интересен многим новичкам. Достаточная дальность действия, чтобы вы могли комфортно себя чувствовать в просторном зале или на пересеченной местности — 100-150 метров, дальше машинка теряется из виду. Мощности современных передатчиков хватает, чтобы передавать команды на расстояние 200-300 метров.
Примером качественного, бюджетного пульта для машины на радиоуправлении является . Это 3-канальная система, работающая в диапазоне 2.4ГГц. Третий канал дает больше возможностей для творчества моделиста и расширяет функциональные возможности авто, например, позволяет управлять светом фар или поворотниками. В памяти передатчика можно запрограммировать и сохранить настройки для 10 различных моделей авто!
Революционеры в мире радиоуправления — лучшие пульты для вашей машины
Применение систем телеметрии стали настоящей революцией в мире радиоуправляемых авто! Моделисту больше не нужно теряться в догадках о том, какую скорость развивает модель, какое напряжение у бортового аккумулятора, сколько топлива осталось в баке, до какой температуры прогрелся двигатель, сколько оборотов он совершает и т.д. Главное отличие от обычной аппаратуры заключается в том, что сигнал передается в двух направления: от пилота к модели и от датчиков телеметрии на пульт.
Миниатюрные датчики позволяют в режиме реального времени мониторить состояние вашего авто. Необходимые данные могут выводиться на дисплей пульта дистанционного управления или на монитор ПК. Согласитесь, очень удобно всегда быть в курсе «внутреннего» состояния авто. Такая система легко интегрируется и просто настраивается.
 Пример пульта «продвинутого» типа — . Аппа работает по технологии «DSM2», которая обеспечивает максимально точный и быстрый отклик. К другим отличительным особенностям стоит отнести большой экран, на котором в графическом виде транслируются данные о настройках и состоянии модели. Spektru/m DX3R считается самой быстрой среди аналогов и гарантированно приведет вас к победе!
Пример пульта «продвинутого» типа — . Аппа работает по технологии «DSM2», которая обеспечивает максимально точный и быстрый отклик. К другим отличительным особенностям стоит отнести большой экран, на котором в графическом виде транслируются данные о настройках и состоянии модели. Spektru/m DX3R считается самой быстрой среди аналогов и гарантированно приведет вас к победе!
В интернет-магазине Planet/a Hobby вы без проблем подберете оборудование для управления моделей, сможете купить пульт управления на радиоуправляемую машинку и другую необходимую электронику: , и т.д. Делайте свой выбор правильно! Если не можете определиться самостоятельно, обращайтесь, с радостью поможем!
Настройка модели нужна не только для того, чтобы показывать быстрейшие круги. Для большинства людей это абсолютно не нужно. Но, даже для езды по дачному участку неплохо было бы иметь хорошую и внятную управляемость, чтобы модель идеально слушалась вас на трассе. Эта статья является основой на пути понимания физики машины. Она нацелена не на профессиональных гонщиков, а на тех, кто только начал кататься.
Задача статьи не запутать вас в огромной массе настроек, а немного рассказать о том, что можно изменять и как эти изменения повлияют на поведение машины.
Порядок изменения может быть самый разнообразный, в сети появились переводы книг по настройкам моделей, поэтому некоторые могут кинуть в меня камень, что, мол, не знаю, степень влияния каждой настройки на поведение модели. Скажу сразу, что степень влияния того или иного изменения меняется при изменении шин (внедорожные, дорожная резина, микропора), покрытия. Поэтому, так как статья нацелена на очень широкий круг моделей, было бы не правильно заявлять о порядке внесения изменений и степени их влияния. Хотя об этом я, конечно, расскажу ниже.
Как настраивать машину
В первую очередь надо придерживаться следующих правил: вносить только одно изменение за заезд, чтобы почувствовать, как внесенное изменение повлияло на поведение машины; но самое главное – это во время остановиться. Не обязательно останавливаться тогда, когда вы покажете лучшее время круга. Главное, чтобы вы могли уверенно управлять машиной и справляться с ней в любых режимах. У начинающих эти две вещи очень часто не совпадают. Поэтому для начала ориентир такой — машина должна позволять вам легко и безошибочно проводить заезд, а это уже 90 процентов победы.
Что изменять?
Угол развала колес (Camber)
Угол развала колес – один из основных элементов настройки. Как видно из рисунка, это угол между плоскостью вращения колеса и вертикальной осью. Для каждой машины (геометрии подвески) есть оптимальный угол, который дает наибольшее сцепления колеса с дорогой. Для передней и задней подвески углы разные. Оптимальный камбер меняется с изменением покрытия – для асфальта максимальное сцепление дает один угол, для ковра другой, и так далее. Поэтому, для каждого покрытия этот угол нужно поискать. Изменение угла наклона колес следует производить от 0 до -3 градусов. Больше нет смысла, т.к. именно в этом диапазоне находится его оптимальное значение.
Главная идея изменения угла наклона такая:
- «больше» угол – лучше сцепление (в случае «сваливания» колес к центру модели этот угол считается отрицательным, поэтому говорить об увеличении угла не совсем правильно, но мы будем считать его положительным и говорить о его увеличении)
- меньше угол – меньше сцепление колес с дорогой
Схождение колес

Схождение задних колес увеличивает стабильность машины на прямой, и в поворотах, то есть, как бы увеличивает сцепление задних колес с покрытием, но снижает максимальную скорость. Как правило, схождение меняется либо установкой разных ступиц, либо опор нижних рычагов. В принципе, и то и другое влияет одинаково. Если требуется лучшая поворачиваемость, то угол схождения следует уменьшать, а если наоборот, нужна недостаточная поворачиваемость, то угол нужно увеличивать.
Схождение передних колес меняется от +1 до -1 градуса (от расхождения колес, до схождения соответственно). Установка этих углов влияет на момент входа в поворот. Это основная задача изменения схождения. Небольшое влияние угол схождения оказывает и на поведение машины внутри поворота.
- больше угол – модель лучше управляется и быстрее входит в поворот, то есть приобретает черты избыточной поворачиваемости
- меньше угол – модель приобретает черты недостаточной поворачиваемости, поэтому она плавнее входит в поворот и хуже поворачивает внутри поворота
Жесткость подвески
Это самый простой способ изменить поворачиваемость и устойчивость модели, правда не самый эффективный. Жесткость пружины (как, отчасти, и вязкость масла) влияет на «сцепление» колес с дорогой. Конечно, говорить об изменении сцепления колес с дорогой при изменении жесткости подвески не правильно, так как меняется не сцепление как таковое. Нр для понимания проще именно термин «изменение сцепления». В следующей статье я постараюсь объяснить и доказать, что сцепление колес остается постоянным, а меняются совсем другие вещи. Итак, сцепление колес с дорогой уменьшается при увеличении жесткости подвески и вязкости масла, но чрезмерно увеличивать жесткость нельзя, иначе машина станет нервной из-за постоянного отрыва колес от дороги. Установка мягких пружин и масла увеличивает сцепление. Опять же не надо бежать в магазин в поисках самых мягких пружин и масла. При излишнем сцеплении машина начинает слишком сильно снижать скорость в повороте. Как говорят гонщики, она начинает «вязнуть» в повороте. Это очень плохой эффект, так как почувствовать его не всегда легко, машина может иметь прекрасный баланс и неплохо управляться, а время круга ухудшается очень сильно. Поэтому для каждого покрытия придется искать баланс между двумя крайностями. Что касается масла, то на кочковатых трассах (особенно на зимних трассах, построенных на дощатом полу) необходимо заправлять очень мягкое масло 20 – 30WT. Иначе, колеса начнут отрываться от дороги, и сцепление с покрытием уменьшится. На ровных трассах с хорошим сцеплением вполне подходит 40-50WT.
При настройке жесткости подвески правило следующее:
- чем жестче передняя подвеска, тем хуже машина поворачивает, она становится более устойчивой к сносу задней оси.
- чем мягче задняя подвеска, тем модель хуже поворачивает, но становится менее склонной к сносу задней оси.
- чем мягче передняя подвеска, тем более выражена избыточная поворачиваемость, и тем выше склонность к сносу задней оси
- чем жестче задняя подвеска, тем больше управляемость приобретает черты избыточной поворачиваемости.
Угол наклона амортизаторов

Угол наклона амортизаторов, по сути, влияет на жесткость подвески. Чем ближе к колесу нижнее крепление амортизатора (перемещаем его в отверстие 4) , тем выше жесткость подвески и тем, соответственно хуже сцепление колес с дорогой. При этом, если верхнее крепление также перемещать ближе к колесу (отверстие 1) подвеска становится еще жестче. Если сместить точку крепления в отверстие 6, то подвеска станет мягче, как и в случае перемещения верхней точки крепления в отверстие 3. Эффект от изменения положения точек крепления амортизаторов такой же как и от изменения жесткости пружин.
Угол наклона шкворня

Угол наклона шкворня – это угол наклона оси вращения (1) поворотного кулака относительно вертикальной оси. В народе шкворнем называют цапфу (или ступицу), в которой установлен поворотный кулак.
Основное влияние угол наклона шкворня оказывает на момент входа в поворот, кроме того, он вносит свой вклад в изменение управляемости внутри поворота. Как правило, угол наклона шкворня меняется либо перемещением верхней тяги вдоль продольной оси шасси, либо заменой самого шкворня. Увеличение угла наклона шкворня улучшает вход в поворот – машина резче в него входит, но возникает склонность к заносу задней оси. Некоторые считают, что при большом угле наклона шкворня ухудшается выход из поворота на открытом дросселе — модель плывет наружу поворота. Но по своему опыту управления моделями и инженерному опыту могу с уверенностью сказать, что на выход из поворота он никак не влияет. Уменьшение угла наклона ухудшает вход в поворот — модель становится менее резкой, но управлять проще – машина делается стабильней.
Угол наклона оси качания нижнего рычага

Хорошо, что кто-то из инженеров додумался менять такие вещи. Ведь угол наклона рычагов (передних и задних) влияет исключительно на отдельные фазы прохождения поворота – отдельно на вход в поворот и отдельно на выход.
На выход из поворота (на газу) влияет угол наклона задних рычагов. При увеличении угла, сцепление колес с дорогой «ухудшается», при этом на открытом дросселе и при повернутых колесах машина стремится уйти на внутренний радиус. То есть увеличивается склонность к заносу задней оси при открытом дросселе (в принципе, при плохом сцеплении колес с дорогой, модель может даже развернуть). При уменьшении угла наклона, сцепление при разгоне улучшается, поэтому разгоняться становится проще, но при этом нет того эффекта, когда на газу модель стремиться перейти на меньший радиус, последнее же при умелом обращении помогает быстрее проходить повороты и выходить из них.
Угол наклона передних рычагов оказывает влияние на вход в поворот при сбросе газа. При увеличении угла наклона модель плавнее входит в поворот и приобретает на входе черты недостаточной поворачиваемости. При уменьшении угла эффект, соответственно, противоположный.
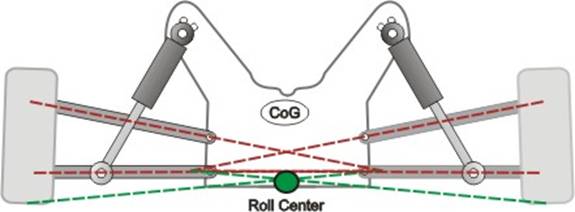
Положение поперечного центра крена

- центр масс машины
- верхний рычаг
- нижний рычаг
- центр крена
- шасси
- колесо
Положение центра крена изменяет сцепление колес с дорогой в повороте. Центр крена – это точка, относительно которой шасси поворачивается под действием сил инерции. Чем выше находится центр крена (чем он ближе к центру масс), тем меньше будет крен и выше сцепление колес с дорогой. То есть:
- Повышение центра крена сзади ухудшает поворачиваемость, но увеличивает устойчивость.
- Понижение центра крена улучшает поворачиваемость, но снижает устойчивость.
- Повышение центра крена спереди улучшает поворачиваемость, но снижает устойчивость.
- Понижение центра крена спереди ухудшает поворачиваемость и увеличивает устойчивость.
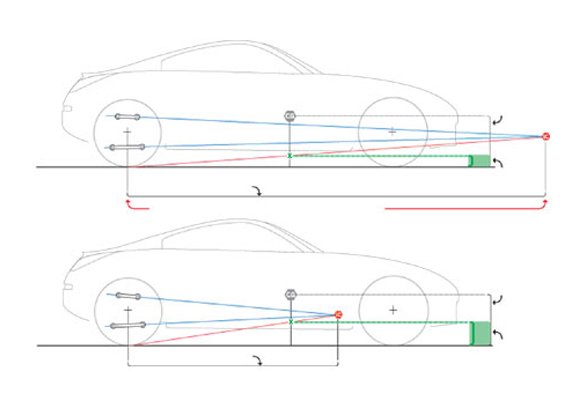
Находится центр крена очень просто: мысленно продлеваем верхние и нижние рычаги и определяем точку пересечения воображаемых линий. Из этой точки проводим прямую в центр пятна контакта колеса с дорогой. Точка пересечения этой прямой и центра шасси — центр крена.
Если точку крепления верхнего рычага к шасси (5) опускать вниз, то центр крена будет подниматься. Если поднимать точку крепления верхнего рычага к ступице, то центр крена также будет подниматься.
Клиренс
Клиренс, или дорожный просвет, влияет на три вещи – устойчивость против опрокидывания, сцепление колес с дорогой, и управляемость.
С первым пунктом все просто, чем выше клиренс, тем выше склонность модели к опрокидыванию (повышается положение центра тяжести).
Во втором случае, повышение клиренса увеличивает крен в повороте, что в свою очередь, ухудшает сцепление колес с дорогой.
При разнице клиренса спереди и сзади получается следующая вещь. Если спереди клиренс ниже, чем сзади, то спереди крен будет меньше, и, соответственно, лучше сцепление передних колес с дорогой – машина приобретет избыточную поворачиваемость. Если сзади клиренс ниже, чем спереди, то модель приобретет недостаточную поворачиваемость.
Вот коротко о том, что можно изменить и как это повлияет на поведение модели. Для начала этих настроек вполне хватит, что бы научиться хорошо ездить, не совершая ошибок на трассе.
Последовательность внесения изменений
Последовательность может быть разнообразной. Многие топ гонщики меняют только то, что устранит недостатки в поведении машины на данной трассе. Они всегда знают, что именно им нужно менять. Поэтому, надо стремиться к тому, чтобы четко понимать, как машина ведет себя в поворотах, и что в поведении не устраивает конкретно вас.
Как правило, с машиной идут заводские настройки. Тестеры, которые подбирают эти настройки, стараются по максимуму сделать их универсальными для всех трасс, чтобы неопытные моделисты не лезли в дебри.
Перед началом тренировок необходимо проверить следующие моменты:
- установить клиренс
- установить одинаковые пружины и залить одинаковое масло.
После чего можно приступать к настраиванию модели.
Начинать настраивать модель можно с малого. Например с углов наклона колес. Причем, лучше всего делать очень большую разницу – 1,5…2 градуса.
Если в поведении машины есть небольшие недостатки, то их можно устранить, ограничившись углами (напомню, вы должны легко справляться с машиной, то есть должна быть небольшая недостаточная поворачиваемость). Если недостатки значительные (модель разворачивает), то следующий этап – изменение угла наклона шкворня и положений центров крена. Как правило, этого достаточно, чтобы добиться приемлемой картины управляемости машины, а нюансы вносятся остальными настройками.
Увидимся на трассе!
Как настроить радиоуправляемую автомодель?
Настройка модели нужна не только для того, чтобы показывать быстрейшие круги. Для большинства людей это абсолютно не нужно. Но, даже для езды по дачному участку неплохо было бы иметь хорошую и внятную управляемость, чтобы модель идеально слушалась вас на трассе. Эта статья является основой на пути понимания физики машины. Она нацелена не на профессиональных гонщиков, а на тех, кто только начал кататься.
Задача статьи не запутать вас в огромной массе настроек, а немного рассказать о том, что можно изменять и как эти изменения повлияют на поведение машины.
Порядок изменения может быть самый разнообразный, в сети появились переводы книг по настройкам моделей, поэтому некоторые могут кинуть в меня камень, что, мол, не знаю, степень влияния каждой настройки на поведение модели. Скажу сразу, что степень влияния того или иного изменения меняется при изменении шин (внедорожные, дорожная резина, микропора), покрытия. Поэтому, так как статья нацелена на очень широкий круг моделей, было бы не правильно заявлять о порядке внесения изменений и степени их влияния. Хотя об этом я, конечно, расскажу ниже.
Как настраивать машину
В первую очередь надо придерживаться следующих правил: вносить только одно изменение за заезд, чтобы почувствовать, как внесенное изменение повлияло на поведение машины; но самое главное — это во время остановиться. Не обязательно останавливаться тогда, когда вы покажете лучшее время круга. Главное, чтобы вы могли уверенно управлять машиной и справляться с ней в любых режимах. У начинающих эти две вещи очень часто не совпадают. Поэтому для начала ориентир такой — машина должна позволять вам легко и безошибочно проводить заезд, а это уже 90 процентов победы.
Что изменять?
Угол развала колес (Camber)
Угол развала колес — один из основных элементов настройки. Как видно из рисунка, это угол между плоскостью вращения колеса и вертикальной осью. Для каждой машины (геометрии подвески) есть оптимальный угол, который дает наибольшее сцепления колеса с дорогой. Для передней и задней подвески углы разные. Оптимальный камбер меняется с изменением покрытия — для асфальта максимальное сцепление дает один угол, для ковра другой, и так далее. Поэтому, для каждого покрытия этот угол нужно поискать. Изменение угла наклона колес следует производить от 0 до -3 градусов. Больше нет смысла, т.к. именно в этом диапазоне находится его оптимальное значение.
Главная идея изменения угла наклона такая:
«больше» угол — лучше сцепление (в случае «сваливания» колес к центру модели этот угол считается отрицательным, поэтому говорить об увеличении угла не совсем правильно, но мы будем считать его положительным и говорить о его увеличении)
меньше угол — меньше сцепление колес с дорогой
Схождение колес
Схождение задних колес увеличивает стабильность машины на прямой, и в поворотах, то есть, как бы увеличивает сцепление задних колес с покрытием, но снижает максимальную скорость. Как правило, схождение меняется либо установкой разных ступиц, либо опор нижних рычагов. В принципе, и то и другое влияет одинаково. Если требуется лучшая поворачиваемость, то угол схождения следует уменьшать, а если наоборот, нужна недостаточная поворачиваемость, то угол нужно увеличивать.
Схождение передних колес меняется от +1 до -1 градуса (от расхождения колес, до схождения соответственно). Установка этих углов влияет на момент входа в поворот. Это основная задача изменения схождения. Небольшое влияние угол схождения оказывает и на поведение машины внутри поворота.
больше угол — модель лучше управляется и быстрее входит в поворот, то есть приобретает черты избыточной поворачиваемости
меньше угол — модель приобретает черты недостаточной поворачиваемости, поэтому она плавнее входит в поворот и хуже поворачивает внутри поворота

Как настроить радиоуправляемую автомодель?
Настройка модели нужна не только для того, чтобы показывать быстрейшие круги. Для большинства людей это абсолютно не нужно. Но, даже для езды по дачному участку неплохо было бы иметь хорошую и внятную управляемость, чтобы модель идеально слушалась вас на трассе. Эта статья является основой на пути понимания физики машины. Она нацелена не на профессиональных гонщиков, а на тех, кто только начал кататься.
Угол развала (Camber)
Колесо с отрицательным углом развала
.
Угол развала
— это угол между вертикальной осью колеса и вертикальной осью автомодели, когда вы смотрите спереди или сзади автомодели. Если верхняя часть колеса находится дальше наружу, чем нижняя часть колеса, это называется положительным развалом.
Если нижняя часть колеса находится дальше наружу, чем верхняя часть колеса, это называется отрицательным развалом.
Угол развала влияет на характеристики управляемости автомодели. В качестве основного правила, увеличение отрицательного развала улучшает сцепление на этом колесе при прохождении поворота (в определенных пределах). Это происходит потому, что это дает нам шину с лучшим распределением сил, возникающих в повороте, более оптимальный угол по отношению к дороге, увеличивающий пятно контакта и передающий силы через вертикальную плоскость шины, а не через поперечную силу через шину. Другой причиной использования отрицательного развала является тенденция резиновой шины перекатываться относительно себя при прохождении поворота. Если колесо обладает нулевым развалом, внутренний край пятна контакта шины начинает подниматься с земли, таким образом снижая площадь пятна контакта. Путем использования отрицательного развала, этот эффект снижается, таким образом максимизируя пятно контакта шины.
С другой стороны, для максимальной величины ускорения на прямом участке, максимальное сцепление будет получено, когда угол развала равен нулю и протектор шины параллелен дороге. Правильное распределение угла развала является главным фактором в конструкции подвески, и должно включать в себя не только идеализированную геометрическую модель, но и реальное поведение компонентов подвески: изгиб, искажение, эластичность и т.п.
Большинство автомоделей обладают некоторой формой подвески с двумя рычагами подвески, что позволяет вам регулировать угол развала (а также прирост развала).
Прирост развала (Camber Intake)
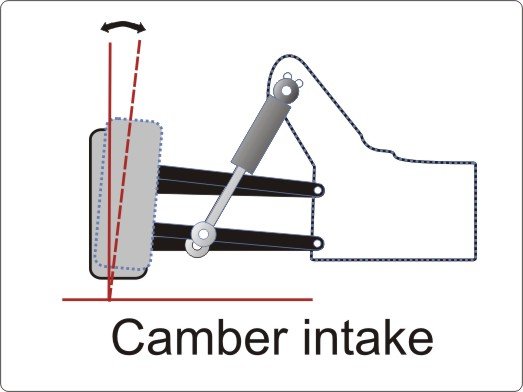
Прирост развала является мерой того, как изменяется угол развала при сжатии подвески. Это определяется длиной рычагов подвески и углом между верхним и нижним рычагами подвески. Если верхний и нижний рычаги подвески являются параллельными, развал не будет изменяться при сжатии подвески. Если угол между рычагами подвески составляет значительную величину, развал будет увеличиваться при сжатии подвески.
Определенная величина прироста развала является полезной для поддержания поверхности шины параллельной поверхности земли, когда автомодель накреняется в повороте.
Примечание:
рычаги подвески должны быть или параллельны, или должны быть ближе к друг к другу на внутренней стороне (стороне автомодели), чем со стороны колес. Наличие рычагов подвески, которые ближе друг к другу на стороне колес, а не на стороне автомодели, будет приводить к радикальному изменению углов развала (автомодель будет вести себя изменчиво).
Прирост развала будет определять, как ведет себя центр крена автомодели. Центр крена автомодели в свою очередь определяет, как будет происходить перенос веса при прохождении поворотов, а это оказывает существенное влияние на управляемость (более подробно об этом смотрите далее).
Угол кастера (Caster Angle)
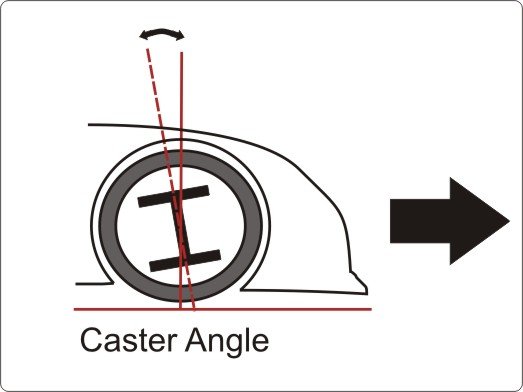
Угол кастера (или кастора) является угловым отклонением от вертикальной оси подвеса колеса в автомодели, измеряемом в продольном направлении (угол поворотной оси колеса, если смотреть сбоку автомодели). Это угол между линией шарниров (в автомодели — воображаемая линия, которая проходит через центр верхней шаровой опоры к центру нижней шаровой опоры) и вертикалью. Угол кастера может быть отрегулирован для оптимизации управляемости автомодели в определенных ситуациях вождения.
Шарнирные точки поворота колеса наклонены таким образом, что линия, проведенная через них, пересекает поверхность дороги немного спереди точки контакта колеса. Целью этого является обеспечение некоторой степени самоцентрируемости рулевого управления — колесо катится позади оси поворота колеса. Это облегчает управление автомоделью и улучшает ее стабильность на прямых участках (снижая тенденцию к отклонению от траектории). Избыточный угол кастера сделает управление более тяжелым и менее отзывчивым, тем не менее, во внедорожных соревнованиях, большие углы кастера используются для улучшения прироста развала при прохождении поворотов.
Схождение (Toe-In) и расхождение (Toe-Out)
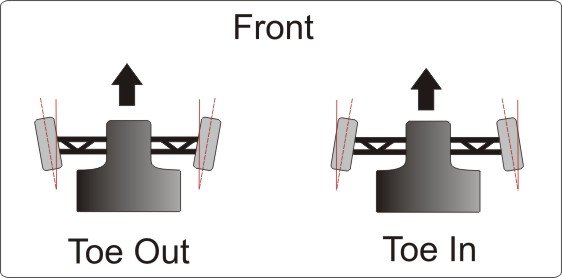
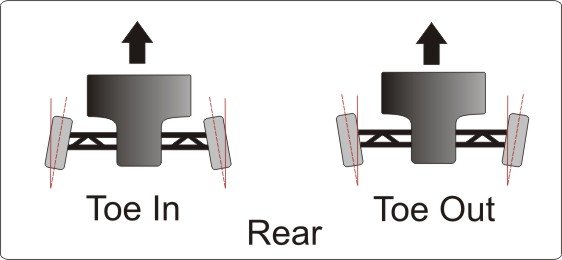
Схождение — это симметричный угол, который каждое колесо составляет с продольной осью автомодели. Схождение — это когда передняя часть колес направлена в сторону центральной оси автомодели.
Передний угол схождения
В основном, увеличенное схождение (передние части колес находятся ближе к друг другу, чем задние части колес) обеспечивает большую стабильность на прямых участках ценой некоторой медлительности отклика на поворот, а также немного увеличенным сопротивлением, так как колеса теперь идут немного боком.
Расхождение на передних колесах, приведет к более отзывчивому управлению и более быстрому входу в поворот. Однако, переднее расхождение обычно означает менее стабильную автомодель (более дерганную).
Задний угол схождения
Задние колеса вашей автомодели всегда должны быть отрегулированы с некоторой степенью схождения (хотя схождение в 0 градусов приемлемо в некоторых условиях). В основном, чем больше заднее схождение, тем более стабильной будет автомодель. Однако, имейте в виду, что увеличение угла схождения (спереди или сзади) будет приводить к снижению скорости на прямых участках (особенно при использовании стоковых моторов).
Еще одной связанной концепцией является то, что схождение, подходящее для прямого участка, не будет подходящим для поворота, так как внутреннее колесо должно идти по меньшему радиусу, чем внешнее колесо. Чтобы это компенсировать, тяги рулевого управления обычно более или менее соответствуют принципу Аккермана для рулевого управления, модифицированному для приспособления к характеристикам конкретной автомодели.
Угол Акермана
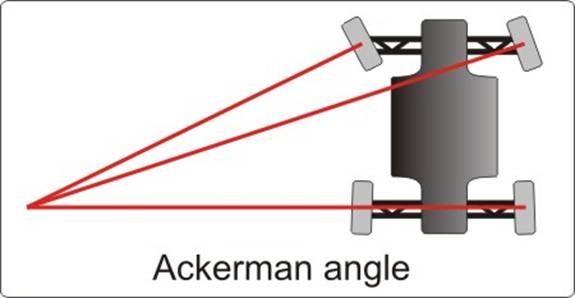
Принцип Аккермана в рулевом управлении — это геометрическое расположение рулевых тяг автомодели, сконструированное для решения проблемы необходимости следования внутренних и внешних колес в повороте по различным радиусам.
Когда автомодель поворачивает, она следует пути, который является частью его окружности поворота, центр которой находится где-то вдоль линии, проходящей через заднюю ось. Повернутые колеса должны быть наклонены так, чтобы они оба составляли угол в 90 градусов с линией проведенной из центра окружности через центр колеса. Поскольку колесо на внешней стороне поворота будет идти по большему радиусу, чем колесо на внутренней стороне поворота, оно должно быть повернуто на другой угол.
Принцип Аккермана в рулевом управлении автоматически урегулирует это путем перемещения рулевых шарниров внутрь так, чтобы он находились на линии, проведенной между осью поворота колеса и центром задней оси. Рулевые шарниры соединены жесткой тягой, которая в свою очередь является частью рулевого механизма. Такое расположение гарантирует, что при любом угле поворота, центры окружностей, по которым следуют колеса, будут находиться в одной общей точке.
Угол бокового увода (Slip angle)
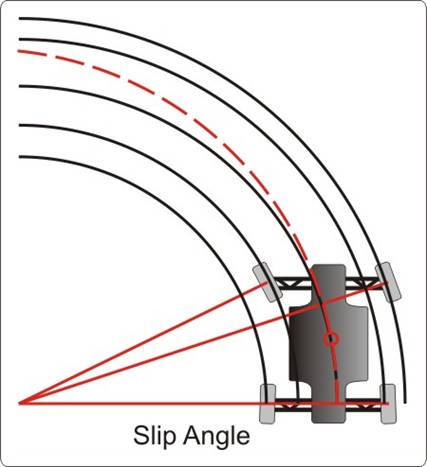
Угол бокового увода — это угол между реальной траекторией движения колеса и направлением, в которое оно указывает. Угол бокового увода приводит в результате к боковой силе перпендикулярной к направлению движения колеса — угловой силе. Эта угловая сила увеличивается примерно линейно первые несколько градусов угла бокового увода, а затем увеличивается нелинейно до максимума, после чего начинает уменьшаться (когда колесо начинает скользить).
Ненулевой угол бокового увода возникает вследствие деформации шины. Во время вращения колеса, сила трения между пятном контакта шины и дорогой приводит к тому, что индивидуальные «элементы» протектора (бесконечно малые участки протектора) остаются неподвижными относительно дороги.
Это отклонение шины приводит к росту угла бокового увода и угловой силы.
Так как силы, которые воздействуют на колеса от веса автомодели, распределяются неравномерно, угол бокового увода каждого колеса будет различным. Соотношение между углами бокового увода будет определять поведение автомодели в данном повороте. Если отношение переднего угла бокового увода к заднему углу бокового увода больше, чем 1:1, автомодель будет подвержена недостаточной поворачиваемости, а если отношение меньше, чем 1:1, то это будет способствовать избыточной поворачиваемости. Реальный мгновенный угол бокового увода зависит от многих факторов, включая состояние дорожного покрытия, но подвеска автомодели может быть сконструирована для обеспечения особых динамических характеристик.
Главным средством регулировки образующихся углов бокового увода является изменение относительного крена спереди-назад путем регулировки величины переднего и заднего бокового переноса веса. Это может быть достигнуто путем изменения высоты центров крена, или путем регулировки жесткости крена, с помощью изменения подвески или с помощью добавления стабилизаторов поперечной устойчивости.
Перенос веса (Weight Transfer)
Перенос веса относится к перераспределению веса, поддерживаемого каждым колесом во время воздействия ускорений (продольного и поперечного). Это включает ускорение, торможение или поворот. Понимание переноса веса является критическим для понимания динамики автомодели.
Перенос веса происходит, поскольку центр тяжести (CoG) смещается во время маневров автомодели. Ускорение вызывает вращение центра масс вокруг геометрической оси, приводя к смещению центра тяжести (CoG). Перенос веса спереди-назад пропорционален отношению высоты центра тяжести к колесной базе автомодели, а боковой перенос веса (в сумме спереди и сзади) пропорционален отношению высоты центра тяжести к колее автомодели, а также высоте его центра крена (разъясняется далее).
Например, когда автомодель ускоряется, ее вес переносится в сторону задних колес. Вы можете наблюдать это, так как автомодель заметно наклоняется назад, или «приседает». И наоборот, при торможении, вес переносится в сторону передних колес (нос «ныряет» к земле). Сходным образом, во время изменений в направлении (боковое ускорение), вес переносится к внешней стороне поворота.
Перенос веса вызывает изменение доступного сцепления на всех четырех колесах, когда автомодель тормозит, ускоряется или поворачивает. Например, так как при торможении происходит перенос веса вперед, передние колеса осуществляют основную «работу» торможения. Это смещение «работы» к одной паре колес от другой приводит к потере общего доступного сцепления.
Если боковой перенос веса достигает нагрузки колеса на одном из концов автомодели, внутреннее колесо на этом конце будет подниматься, вызывая изменение в характеристиках управления. Если этот перенос веса достигает половины веса автомодели, она начинает переворачиваться. Некоторые большие траки будут переворачиваться перед скольжением, а дорожные автомодели обычно переворачиваются только тогда, когда они сходят с дороги.
Центр крена (Roll center)
Центр крена автомодели является воображаемой точкой, отмечающей центр, вокруг которого происходит крен автомодели (в поворотах), если смотреть спереди (или сзади).
Положение геометрического центра крена диктуется исключительно геометрией подвески. Официальное определение центра крена звучит так: «Точка на поперечном сечении через любую пару центров колес, в которой боковые силы могут быть применены к подпружиненной массе без создания крена подвески».
Значение центра крена может быть оценено только в том случае, когда учитывается центр массы автомодели. Если есть различие между положениями центра масс и центра крена, то создается «плечо момента». Когда автомодель испытывает боковое ускорение в повороте, центр крена перемещается вверх или вниз, и размер плеча момента, объединенный с жесткостью пружин и стабилизаторов поперечной устойчивости, диктует величину крена в повороте.
Геометрический центр крена автомодели может быть найден с помощью следующих основных геометрических процедур, когда автомодель находится в статическом состоянии:
Проведите воображаемые линии параллельно рычагам подвески (красного цвета). Затем проведите воображаемые линии между точками пересечения красных линий и нижними центрами колес, как показано на рисунке (зеленого цвета). Точка пересечения этих зеленых линий является центром крена.
Вам необходимо отметить, что центр крена перемещается, когда подвеска сжимается или поднимается, поэтому в действительности это мгновенный центр крена. Насколько этот центр крена перемещается при сжатии подвески, определяется длиной рычагов подвески и углом между верхними и нижними рычагами подвески (или регулируемых тяг подвески).
При сжатии подвески, центр крена поднимается выше и плечо момента (расстояние между центром крена и центром тяжести автомодели (CoG на рисунке)) будет уменьшаться. Это будет означать, что при сжатии подвески (например, при прохождении поворота), автомодель будет иметь меньшую тенденцию крениться (что хорошо, если вы не хотите перевернуться).
Когда вы используете шины с высоким сцеплением (микропористая резина), вы должны установить рычаги подвески таким образом, чтобы центр крена значительно поднимался при сжатии подвески. Дорожные автомодели с ДВС обладают очень агрессивными углами рычагов подвески для поднятия центра крена при прохождении поворотов и предотвращения переворачивания при использовании шин из микропористой резины.
Использование параллельных, равной длины рычагов подвески, приводит к фиксированному центру крена. Это означает, что при наклоне автомодели, плечо момента будет принуждать автомодель крениться все больше и больше. В качестве основного правила, чем выше центр тяжести вашей автомодели, тем выше должен быть центр крена для того, чтобы избежать переворачиваний.
«Bump Steer» — это тенденция колеса поворачивать, когда оно смещается вверх по ходу подвески. На большинстве автомоделей, передние колеса обычно испытывают расхождение (передняя часть колеса перемещается наружу), при сжатии подвески. Это обеспечивает недостаточную поворачиваемость при крене (когда вы сталкиваетесь с выступом при повороте, автомодель стремится выпрямиться). Избыточный «bump steer» увеличивает износ шин и на неровных трассах делает автомодель дерганной.
«Bump Steer» и центр крена
На ухабе, оба колеса поднимаются вместе. При крене, одно колесо поднимается, а другое опускается. Обычно это производит большее схождение на одном колесе и большее расхождение на другом колесе, таким образом обеспечивая эффект поворота. При простом анализе вы можете просто допустить, что подруливание при крене аналогично «bump steer», но на практике вещи подобные стабилизатору поперечной устойчивости оказывают влияние, которое это изменяет.
«Bump steer» может быть увеличен путем поднятия внешнего шарнира или опускания внутреннего шарнира. Обычно требуется небольшая регулировка.
Недостаточная поворачиваемость (Understeer)
Недостаточная поворачиваемость — условие управляемости автомодели в повороте, при котором круговой путь движения автомодели имеет заметно больший диаметр, чем у круга, обозначенного направлением колес. Этот эффект противоположен избыточной поворачиваемости (oversteer) и в простых словах недостаточная поворачиваемость является условием, в котором передние колеса не следуют по траектории, заданной водителем для прохождения поворота, а вместо этого следуют по более прямолинейной траектории.
Это еще часто называют выталкиванием или отказом поворачивать. Автомодель называют «зажатой», так как она стабильна и далека от тенденции к заносу.
Так же как с избыточной поворачиваемостью, недостаточная поворачиваемость имеет множество источников, таких как механическое сцепление, аэродинамика и подвеска.
Традиционно, недостаточная поворачиваемость имеет место, когда передние колеса имеют недостаточное сцепление во время поворота, таким образом передняя часть автомодели имеет меньшее механическое сцепление и не может следовать по траектории в повороте.
Углы развала, дорожный просвет и центр тяжести являются важными факторами, которые определяют условие недостаточной/избыточной поворачиваемости.
Является общим правилом, что производители сознательно настраивают автомодели для наличия небольшой недостаточной поворачиваемости. Если автомодель обладает небольшой недостаточной поворачиваемостью, она является более стабильной (в пределах средних способностей водителя), при резких изменениях направления движения.
Как отрегулировать вашу автомодель для снижения недостаточной поворачиваемости
Вы должны начать с увеличения отрицательного развала передних колес (никогда не превышайте угол в -3 градуса для дорожных автомоделей и 5-6 градусов для внедорожных автомоделей).
Другим способом снижения недостаточной поворачиваемости является снижение отрицательного развала задних колес (он всегда должен быть Еще одним способом уменьшения недостаточной поворачиваемости является снижение жесткости или удаление переднего стабилизатора поперечной устойчивости (или увеличение жесткости заднего стабилизатора поперечной устойчивости).
Важно отметить, что любые регулировки являются предметом компромисса. Автомодель обладает ограниченной величиной общего сцепления, которое может быть распределено между передними и задними колесами.
Избыточная поворачиваемость (Oversteer)
Автомодель обладает избыточной поворачиваемостью, когда задние колеса не следуют позади передних колес, а вместо этого скользят в сторону внешней стороны поворота. Избыточная поворачиваемость может привести к заносу.
На тенденцию автомодели к избыточной поворачиваемости влияет несколько факторов, таких как механическое сцепление, аэродинамика, подвеска и стиль вождения.
Предел избыточной поворачиваемости наступает, когда задние шины превышают предел своего бокового сцепления во время поворота перед тем, как это происходит с передними шинами, таким образом вызывая ситуацию, когда задняя часть автомодели направлена в сторону внешней стороны поворота. В общем смысле избыточная поворачиваемость является условием, когда угол бокового увода задних шин превосходит угол бокового увода передних шин.
Автомодели с задним приводом более подвержены избыточной поворачиваемости, в особенности при использовании газа в тесных поворотах. Это происходит потому, что задние шины должны выдерживать боковые силы и тягу двигателя.
Тенденция автомодели к избыточной поворачиваемости обычно увеличивается при смягчении передней подвески или ужесточении задней подвески (или при добавлении заднего стабилизатора поперечной устойчивости). Углы развала, дорожный просвет и температурный класс шин также могут быть использованы для настройки баланса автомодели.
Автомодель с избыточной поворачиваемостью может еще называться «свободной» или «незажатой».
Как вы различаете избыточную и недостаточную поворачиваемость?
Когда вы входите в поворот, избыточная поворачиваемость — это когда автомодель поворачивает круче, чем вы ожидаете, а недостаточная поворачиваемость — это когда автомодель поворачивает меньше, чем вы ожидаете.
Обладать избыточной или недостаточной поворачиваемость, вот в чем вопрос
Как упоминалось ранее, любые регулировки являются предметом компромисса. Автомодель обладает ограниченным сцеплением, которое может быть распределено между передними и задними колесами (это может быть расширено с помощью аэродинамики, но это уже другая история).
Все спортивные автомодели развивают более высокую боковую (т.е. боковое скольжение) скорость, чем это определяется направлением, в которое указывают колеса. Различие между кругом, по которому катятся колеса, и направлением, в которое они указывают, является углом бокового увода (slip angle). Если углы бокового увода передних и задних колес являются одинаковыми, автомодель обладает нейтральным балансом управляемости. Если угол бокового увода передних колес превосходит угол бокового увода задних колес, говорят, что автомодель обладает недостаточной поворачиваемостью. Если угол бокового увода задних колес превосходит угол бокового увода передних колес, говорят, что автомодель обладает избыточной поворачиваемостью.
Просто запомните, что автомодель с недостаточной поворачиваемостью сталкивается с ограждением передней частью, автомодель с избыточной поворачиваемостью сталкивается с ограждением задней частью, а автомодель с нейтральной управляемостью касается ограждения обоими концами одновременно.
Другие важные факторы, которые следует учесть
Любая автомодель может испытывать недостаточную или избыточную поворачиваемость в зависимости от дорожных условий, скорости, доступного сцепления и действий водителя. Конструкция автомодели, однако, имеет тенденцию к индивидуальному «предельному» условию, когда автомодель достигает и превосходит пределы сцепления. «Предельная недостаточная поворачиваемость» относится к автомодели, которая благодаря конструктивным особенностям стремится к недостаточной поворачиваемости, когда угловые ускорения превосходят сцепление шин.
Предельный баланс управляемости является функцией переднего/заднего относительного сопротивления крену (жесткость подвески), переднего/заднего распределения веса и переднего/заднего сцепления шин. Автомодель с тяжелой передней частью и низким задним сопротивлением крену (из-за мягких пружин и/или малой жесткости, или отсутствия задних стабилизаторов поперечной устойчивости) будет обладать тенденцией к предельной недостаточной поворачиваемости: ее передние шины, будучи более тяжело нагружены даже в статическом состоянии, будут достигать пределов своего сцепления раньше, чем задние шины, и таким образом будут развивать большие углы бокового увода. Автомодели с передним приводом также подвержены недостаточной поворачиваемости, так как они обычно не только обладают тяжелой передней частью, но и подача мощности на передние колеса также снижает их сцепление доступное для поворота. Это часто приводит к эффекту «дрожания» на передних колесах, так как сцепление неожиданно изменяется вследствие передачи мощности от двигателя на дорогу и управления.
Хотя недостаточная и избыточная поворачиваемости обе могут вызывать потерю контроля, многие производители разрабатывают свои автомодели для предельной недостаточной поворачиваемости в предположении, что для среднего водителя это легче контролировать, чем предельную избыточную поворачиваемость. В отличие от предельной избыточной поворачиваемости, которая часто требует нескольких корректировок управления, недостаточная поворачиваемость часто может быть снижена с помощью понижения скорости.
Недостаточная поворачиваемость может проявляться не только во время ускорения в повороте, она также может проявиться во время резкого торможения. Если баланс тормозов (усилие торможения на передней и задней оси) слишком смещен вперед, это может вызвать недостаточную поворачиваемость. Это вызывается блокированием передних колес и потерей эффективного управления. Может иметь место и противоположный эффект, если баланс тормозов слишком смещен назад, то задний конец автомодели заносит.
Спортсмены, на асфальтовых поверхностях, в основном предпочитают нейтральный баланс (с небольшой тенденцией в сторону недостаточной или избыточной поворачиваемости, в зависимости от трассы и стиля вождения), так как недостаточная и избыточная поворачиваемость приводят к потерям скорости во время прохождения поворотов. В заднеприводных автомоделях недостаточная поворачиваемость в основном дает лучшие результаты, так как задние колеса нуждаются в некотором доступном сцеплении для ускорения автомодели на выходе из поворотов.
Жесткость пружин (Spring rate)
Жесткость пружин является инструментом для настройки дорожного просвета автомодели и ее положение в ходе подвески. Жесткость пружины — коэффициент, используемый для измерения величины сопротивления сжатию.
Пружины, которые являются слишком жесткими или слишком мягкими, фактически приведут к тому, что автомодель вовсе не будет иметь подвески.
Жесткость пружины, приведенная к колесу (Wheel rate)
Жесткость пружины, приведенная к колесу, является эффективной жесткостью пружины, когда она измеряется на колесе.
Жесткость пружины, приведенная к колесу, обычно равна или значительно меньше, чем жесткость самой пружины. Обычно, пружины крепятся на рычагах подвески или других деталях шарнирной системы подвески. Предположим, что при смещении колеса на 1 дюйм пружина смещается на 0,75 дюйма, соотношение рычага будет 0,75:1. Жесткость пружины, приведенная к колесу, вычисляется путем возведения в квадрат соотношения рычага (0,5625), умножения на жесткость пружины и на синус угла наклона пружины. Соотношение возводится в квадрат благодаря двум эффектам. Соотношение применяется к силе и проходимому расстоянию.
Ход подвески (Suspension Travel)
Ход подвески является расстоянием от нижней части хода подвески (когда автомодель находится на подставке и колеса свободно висят), до верхней части хода подвески (когда колеса автомодели больше не могут подниматься выше). Достижение колесом нижнего или верхнего предела может вызывать серьезные проблемы контроля. «Достижение предела» может быть вызвано выходом за пределы перемещения подвески, шасси и т.п. или касанием дороги корпусом или другими компонентами автомодели.
Демпфирование (Damping)
Демпфирование — это контроль движения или колебания с помощью использования гидравлических амортизаторов. Демпфирование контролирует скорость перемещения и сопротивление подвески автомодели. Автомодель без демпфирования будет совершать колебания вверх и вниз. С помощью подходящего демпфирования, автомодель будет возвращаться обратно в нормальное состояние за минимальное время. Демпфирование в современных автомоделях может контролироваться с помощью увеличения или уменьшения вязкости жидкости (или размера отверстий в поршне) в амортизаторах.
Анти-дайв и анти-скват (Anti-dive and Anti-squat)
Анти-дайв и анти-скват выражаются в процентах и относятся к нырку передней части автомодели при торможении и приседанию задней части автомодели при ускорении. Они могут считаться двойниками для торможения и ускорения, в то время как высота центра крена работает в поворотах. Основная причина их различия состоит в разных конструкторских целях для передней и задней подвески, тогда как подвеска обычно симметрична между правой и левой сторонами автомодели.
Процент анти-дайва и анти-сквата всегда вычисляется относительно вертикальной плоскости, которая пересекает центр тяжести автомодели. Сначала рассмотрим анти-скват. Определите место заднего мгновенного центра подвески, если смотреть на автомодель сбоку. Проведите линию от пятна контакта шины через мгновенный центр, это будет вектор силы колеса. Теперь проведите вертикальную линию через центр тяжести автомодели. Анти-скват является отношением между высотой точки пересечения вектора силы колеса и высотой центра тяжести, выраженным в процентах. Значение анти-сквата в 50% будет означать, что вектор силы при ускорении проходит посередине между землей и центром тяжести.
Анти-дайв является двойником анти-сквата и работает для передней подвески во время торможения.
Круг сил (Circle of forces)
Круг сил является полезным способом думать о динамическом взаимодействии между шиной автомодели и поверхностью дороги. На диаграмме ниже мы смотрим на колесо сверху, так что поверхность дороги лежит в плоскости x-y. Автомодель, к которой присоединено колесо, перемещается в положительном y направлении.
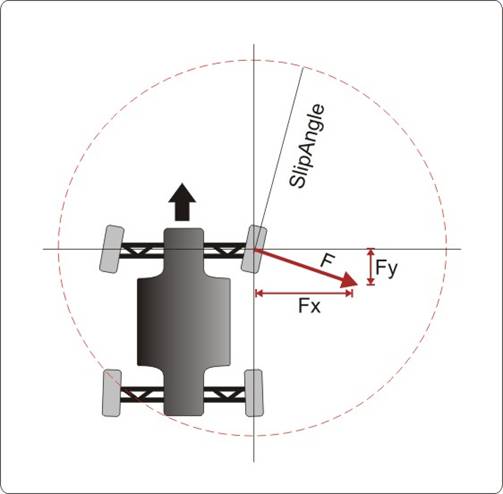
В этом примере, автомодель будет поворачивать направо (т.е. положительное x направление направлено к центру поворота). Обратите внимание, что плоскость вращения колеса находится под углом к реальному направлению, в котором перемещается колесо (в положительном y направлении). Этот угол является углом бокового увода.
Предел величины F ограничен пунктирным кругом, F может быть любой комбинацией компонентов Fx (поворот) и Fy (ускорение или торможение), которая не превосходит пунктирного круга. Если комбинация сил Fx и Fy выходит за границы круга, шина теряет сцепление (вы скользите или вас заносит).
В этом примере, шина создает компонент силы в направлении x (Fx), которая, при передаче к шасси автомодели через систему подвески в комбинации со сходными силами от остальных колес, будет вызывать поворот автомодели направо. На диаметр круга сил и, следовательно, на максимальную горизонтальную силу, которую может создавать шина, влияет множество факторов, включая конструкцию шины и ее состояние (возраст и температурный диапазон), качество дорожной поверхности и вертикальная нагрузка на колесо.
Критическая скорость
Автомодель с недостаточной поворачивемостью обладает сопутствующим режимом нестабильности, называемым критической скоростью. При приближении к этой скорости управление становится все более чувствительным. На критической скорости скорость рыскания становится бесконечной, то есть, автомодель продолжает поворачивать даже при выпрямленных колесах. На скоростях выше критической простой анализ показывает, что угол поворота должен быть реверсирован (контр-руление). Автомодель с недостаточной поворачиваемостью этому не подвержена, это одна из причин, по которой высокоскоростные автомодели настраивают на недостаточную поворачиваемость.
Поиск золотой середины (или сбалансированная автомодель)
Автомодель, которая не страдает от избыточной или недостаточной поворачиваемости, когда она используется на своем пределе, обладает нейтральным балансом. Это кажется интуитивным, что спортсмены будут предпочитать небольшую избыточную поворачиваемость для вращения автомодели вокруг поворота, но это обычно не используется по двум причинам. Раннее ускорение, как только автомодель проходит апекс поворота, позволяет автомодели набрать дополнительную скорость на последующем прямом участке. Водитель, который ускоряется раньше или резче, имеет большое преимущество. Задним шинам требуется некоторое избыточное сцепление для ускорения автомодели в этой критической фазе поворота, в то время как передние шины могут посвятить все свое сцепления для поворота. Поэтому автомодель должна быть настроена с небольшой тенденцией к недостаточной поворачиваемости или должна быть немного «зажата». Также, автомодель с избыточной поворачиваемостью является дерганной, увеличивая вероятность потери контроля во время длительных соревнований или при реакции на неожиданную ситуацию.
Имейте в виду, что это применимо только для соревнований на дорожном покрытии. Соревнования на грунте это совсем другая история.
Некоторые успешные водители предпочитают небольшую избыточную поворачиваемость в своих автомоделях, предпочитая менее спокойную автомодель, которая легче входит в повороты. Необходимо отметить, что суждение о балансе управляемости автомодели не является объективным. Стиль вождения является главным фактором в видимом балансе автомодели. Поэтому два водителя с идентичными автомоделями часто используют их с различными настройками баланса. И оба могут называть баланс своих автомоделей «нейтральным».